HC-SR04 Arduino Nano
Arduino HC-SR04 Ultrasonic Sensor and Processing
Parts Required:
– Arduino NANO v3.0
– HC-SR04 Ultrasonic Sensor
– Wires to connect it all together
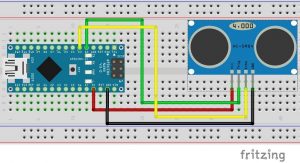
Connect the components and wires as shown in the two pictures.
chart
Information:
The module includes ultrasonic transmitters, receivers, and a control circuit in a single package.


Processing is available for Linux, Mac OS X, and Windows.
Processing Code:

//Example by Hisham Marzouk
//www.Officialhrm.com
import processing.serial.*;
import java.awt.event.KeyListener;
import java.awt.Robot;
import guru.ttslib.*;
Serial myPort;
Robot robot;
TTS tts;
String val;
boolean valtrue;
int xy = 0;
int x=0;
PImage bg;
void setup()
{
bg = loadImage(“lside.jpg”);
size(1075,110);
background(bg);
String portName = Serial.list()[0];
myPort = new Serial(this, portName, 9600);
myPort.bufferUntil(‘.’);
try {
robot = new Robot();
}
catch (Exception e) {
e.printStackTrace();
}
}
void draw() {
//reading serial port until new Line
String sensorValue = myPort.readStringUntil(‘\n’);
if (sensorValue != null) {
int value = Integer.parseInt(sensorValue.trim());
println(value);
background(bg);
ellipse(value *35.79, 55, 1, 115);
fill(33,77,88);
}
}

Download: Arduino HC-SR04 diagram
Thank you for visiting. If you found this information helpful, please consider subscribing to the Officialhrm YouTube channel and liking their Facebook Page for more updates and helpful content. Don’t forget to share this website with your friends.
Download
| File | Description | Date added | File size | Downloads |
|---|---|---|---|---|
 Arduino HC-SR04 diagram
Arduino HC-SR04 diagram
|
August 15, 2018 4:15 pm | 505 KB | 10641 |